数学、特に多変数微分積分学において陰函数定理(いんかんすうていり、英: implicit function theorem)は、解析的な多項関係を多変数函数に読み替え、関係を函数のグラフとして表すことを可能にする基本的な道具である。関係の全体は一つの函数のグラフとして大域的に表せないものの、関係の一部は一つの函数のグラフとして局所的に表せることがある。陰函数定理はそのような函数(陰函数)が存在する十分条件を与える。
定理の主張する所は、函数 f(x, y) = f(x1, …, xn, y1, …, ym) がある零点の偏微分係数に関して一種の非特異性を満足するならば、その開近傍において方程式
を m 個の変数 y について解いて n 個の変数 x による函数
として表すことができる、というものである。(ただし、必ずしも既知函数の閉じた形に書くことができるとは限らない。)方程式 f(x, y) = 0 から陰函数 g(x)が定まるというのは、幾何学的には軌跡 f(x, y) = 0 から局所的に超曲面 y = g(x) が定まることを意味する。
例と導入
二変数函数 f を f(x, y) = x2 y2 − 1 と定めると、単位円をその等高線 f(x, y) = 0 として表すことができる。ところが各 −1 < x < 1 に対して y は相異なる二つの値(具体的には ±√1 − x2)をとるので、単位円の全体を一変数函数 y = g(x) のグラフとして表すことはできない。
しかしながら、単位円の一部であれば一変数函数のグラフとして表すことができることがある。たとえば
とすれば、y = g (x) のグラフは単位円の上半分と一致する。同様に
とすれば、y = g−(x) のグラフは単位円の下半分と一致する。
単位円に対する g±(x) のような陰函数が存在し、かつ十分に滑らかであることを、明示的な式を書き下せない状況下でさえ保証する一般的な命題が陰函数定理である。
定理の主張
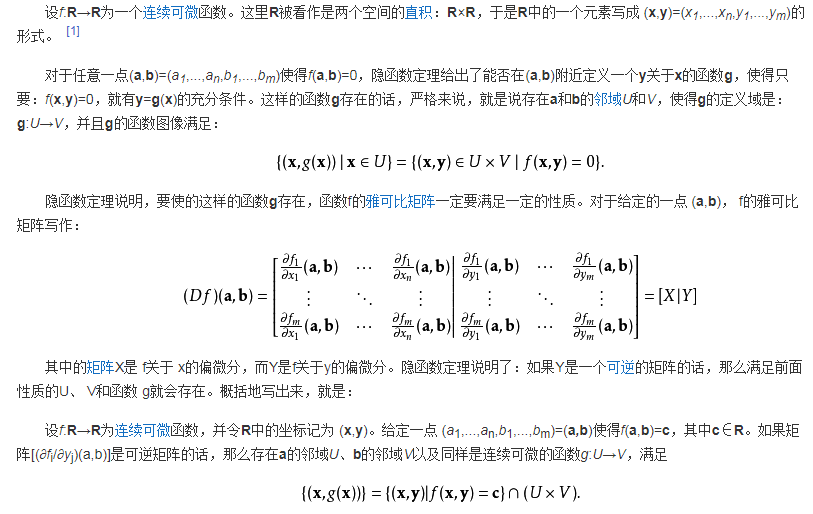
開集合 Ω ⊂ Rn m 上の連続微分可能な函数 f: Ω → Rm をとる。始域 Ω を直積集合 Rn × Rm の部分集合と見做して、この直積に属する元を (x, y) = (x1, …, xn, y1, …, ym) と書く。そのような函数 f が与えられたところから始めて、最終的に函数 g: Rn → Rm でそのグラフ (x, g(x)) が f(x, y) の零点集合と一致するようなものを見つけることを考える。
既に述べたとおり、そのようなことは常に可能というわけではない。そこで f(x, y) の零点 (a, b) = (a1, …, an, b1, …, bm) を固定し、その近くで目的に合う g を見つけることに視点を移す。すなわち、U × V ⊂ Ω を満たす点 a の開近傍 U と点 b の開近傍 V、および函数 g: U → V の三つ組 U, V, g で、 g のグラフが U × V 上で関係 f = 0 を満足するもの、式で書けば U × V 内の各点 (x, y) で
を満足するものを求めたい。
陰函数定理を述べるためには、f = (f1, …, fm) のヤコビ行列(函数行列)が必要である。それは f のすべての偏微分によって形作られる行列で、(a, b) における値は
で与えられる。右辺において、X は変数 xi たちに関する偏微分からなる行列、Y は変数 yj に関する偏微分からなる行列である。陰函数定理が述べるのは、このときの行列 Y が正則ならば、所期の通りの U, V, g が存在することである。以上全ての仮定をまとめれば以下の定理を得る。
正則性 (regularity) に関して以下のような一般化が可能である:
例の再考
ふたたび単位円の例に戻ろう。すなわち、定理において n = m = 1 および f(x, y) = x2 y2 − 1 と置いた場合であり、ヤコビ行列は 1×2-行列
で与えられる。したがって定理に言う Y はここでは単に数 2b で、それが定める線型写像が正則であるための必要十分条件は b ≠ 0 である。ゆえに陰函数定理によれば、単位円は、y ≠ 0 なる任意の点に対して局所的に y = g(x) の形に書くことができる。しかし、既に上でも述べたが、点 (±1, 0) においては問題が生じる。陰函数定理はこれら二つの点においても適用することは未だ可能であるが、それは x を y の函数 x = h(y) と見てのことである。実際、そのグラフを (h(x), y) とすれば、b = 0 のとき a = 1 と取れるから、局所的にこの形の函数に表されるための条件は満足されている。
y の x に関する陰函数微分、および x の y に関する陰函数微分は、陰函数 x2 y2 − 1 の全微分 を 0 に等しいと置いた
から求めることができる。すなわち、dy/dx = −x/y および dx/dy = −y/x が成り立つ。
応用: 座標変換
以下、座標系 (x1, …, xm) で座標付けられた m-次元空間を考える。これに適当な函数系 h1, …, hm を施して、新たな座標系 (x'1, …, x'm) を導入する。すなわち、各点の新座標は旧座標から
と計算することができる。この逆が可能であるかどうか、すなわち各点の新座標 (x'1, …, x'm) から旧座標 (x1, …, xm) に戻せるか、を検証したいと考えるかもしれない。この問いに、陰函数定理は一つの答えを提供する。
新旧の座標の対、(x'1, …, x'm, x1, …, xm) は
と置くことにより、f = 0 なる関係を持つ。ここに f の適当な点 (a, b) = (x'1, …, x'm, x1, …, xm) におけるヤコビ行列は
で与えられる。右辺の 1m は m×m-単位行列で J は各偏微分の (a, b) における値からなる行列である(これらは上で X および Y と書いていたものである。いまの例ではたまたまどちらの行列も a に依存しない)。陰函数定理の主張に従えば、この行列 J が正則であるときには、(x1, …, xm) は局所的に (x'1, …, x'm) の函数として表される。J が正則であることは det(J) ≠ 0 と同値であるから、J の行列式が非零であるとき、新座標は旧座標に引き戻すことができることが分かった。この主張もまた逆写像定理と呼ばれている。
例: 極座標系
簡単な例として、平面上の極座標系 (r, θ) を考える。新たな座標系として直交座標系を考えれば、変換は x(r, θ) = r cos(θ) および y(r, θ) = r sin(θ) で与えられる。これにより、任意の点 (r, θ) が与えられれば、対応する直交座標 (x, y) が計算できる。逆に直交座標を極座標に変換することができるのはいつなのかを考えよう。前節に従えば、ヤコビ行列
が det(J) ≠ 0 を満たすことが十分であった。ここに det(J) = r が成り立つから、極座標に戻すためには r ≠ 0 が十分である。ゆえに残りの r = 0 の場合に関して確かめよう。この場合、座標変換が可逆でないことを確かめることは容易である。実際、原点において θ の値は定義可能でない。
一般化
バナッハ空間版
バナッハ空間における逆写像定理は、陰函数定理がバナッハ空間値の写像に対しても拡張できることに基づく。
X, Y, Z がバナッハ空間で、写像 f: X × Y → Z は連続フレシェ微分可能とする。(x0, y0) ∈ X × Y は f(x0, y0) = 0 を満たし、かつ y ↦ Df(x0, y0)(0, y) が Y から Z の上へのバナッハ空間同型となるならば、x0 の近傍 U と y0 の近傍 V およびフレシェ微分可能函数 g: U → V が存在して、任意の (x, y) ∈ U × V に対して f(x, g(x)) = 0 かつ f(x, y) = 0 ⇔ y = g(x) とできる。
微分不能函数の定める陰函数
函数 f が微分可能でない場合の陰函数定理には様々な形のものが存在する。標準的な定理は一次元において成立するものである。以下に示すより一般の形の定理は、Jittorntrum の観察に基づいて、Kumagaiが証明した。
- 定理
- 函数 f: Rn × Rm → Rn は f(x0, y0) = 0 を満たすとする。x0 および y0 それぞれの開近傍 A ⊂ Rn および B ⊂ Rm が存在して、任意の y ∈ B に対して f(• y): A → Rn が局所的に一対一となるならば、x0 および y0 それぞれの開近傍 A0 ⊂ Rn および B0 ⊂ Rm が存在して、方程式 f(x, y) = 0 が一意な解 x = g(y) ∈ A0 を持つ。ここで g は B0 から A0 への連続函数である。
関連項目
- 階数一定定理: 陰函数定理および逆写像定理の一般化
注
参考文献
- Chiang, Alpha C. (1984). Fundamental Methods of Mathematical Economics (3rd ed.). McGraw-Hill
- Danilov, V.I. (2001), “Implicit function (in algebraic geometry)”, in Hazewinkel, Michiel, Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4, https://www.encyclopediaofmath.org/index.php?title=Implicit_function_(in_algebraic_geometry) .
- Edwards, Charles Henry (1994) [1973]. Advanced Calculus of Several Variables. Mineola, New York: Dover Publications. ISBN 978-0-486-68336-2
- Fritzsche, K.; Grauert, H. (2002). From Holomorphic Functions to Complex Manifolds. Springer. https://books.google.de/books?id=jSeRz36zXIMC&lpg=PP1&dq=fritzsche grauert&hl=de&pg=PA34#v=onepage&q&f=false
- Jittorntrum, K. (1978). “An Implicit Function Theorem”. Journal of Optimization Theory and Applications 25 (4). doi:10.1007/BF00933522.
- Kudryavtsev, Lev Dmitrievich (2001), “Implicit function”, in Hazewinkel, Michiel, Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4, https://www.encyclopediaofmath.org/index.php?title=Implicit_function .
- Kumagai, S. (1980). “An implicit function theorem: Comment”. Journal of Optimization Theory and Applications 31 (2). doi:10.1007/BF00934117.
- Lang, Serge (1999). Fundamentals of Differential Geometry. Graduate Texts in Mathematics. New York: Springer. ISBN 978-0-387-98593-0